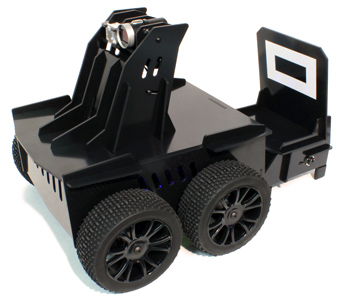
Oculus Prime Pi Explorer is the ultimate internet operated vehicle, ideal for remote presence, inspection and monitoring, powered by a Raspberry Pi single board computer.
It features live streaming video and audio, always-on reliability, auto-docking charging, high-intensity lights, web-browser and Android app remote control, and up to 10 hours of battery life.
It can be programmed with autonomous functions using the Oculusprime Telnet API. All control software is open source.
- Real-Time Streaming Video
- Powerful 4WD Traction
- High Intensity Lights
- Web Browser and Smartphone Control
- Encoder and Gyro precision Odometry
- Open Source API
|
- Auto-Docking Charging Station
- Powered by a Raspberry Pi 3B single board computer
- Video Recording
- Multiple wifi network Auto-Switching
- WiFi and 4G/LTE connectivity capable
|
Hardware
- Auto-docking charging station
- 4 wheel gearmotors including encoder
- 5000 mAh 3-cell LiPo battery, up to 10 hours run time
- Xaxxon POWER v2 PCB, battery charging and power management
- Arduino compatible Xaxxon MALG motor/audio/lights/gyro controller
- Servo-tilting camera and lights
- Speaker, microphone
- Raspberry Pi 3B single board computer
- Wifi connectivity, overlapping network auto-switching
- CNC machined high-impact ABS frame
- Made in Canada
It comes pre-configured, tested and calibrated, with Linux Xubuntu 16.04 OS and the Oculusprime Java Server Application installed
Control Software
- Open source Oculusprime Java Server includes web, telnet and streaming media servers
- Web browser and Android app remote control
- Multiple simultaneous remote video streaming connections possible, multiple user accounts, text chatting
- Fully programmable / customizable via the Oculus Prime Telnet API
- 4G/LTE connectivity ready
- Sound detection
- Send alerts via email and on-board RSS feed
↑ back to top
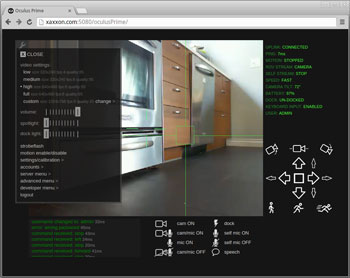
Remote Control Clients
Oculus Prime can be controlled over the internet from anywhere, using a standard web-browser, or by using our Oculus Prime TeleOperator smartphone/tablet app. Settings configuration and calibration is done primarily through the web-browser client.
Auto-Charging
|

|
Docking with the wall-powered charging dock is handled automatically via 2D image processing through the included camera. The robot docks with the charger backwards, so it's not starting at a wall when charging.
The system can be configured to send a message (email, SMS, etc.) if it can't dock for some reason, to ask for help.
↑ back to top
Oculus Prime - Pi Explorer
Specifications
| Wheels | - 4 x 125mm diameter, skid steering
|
| Motors | - 4 x quiet running 12V DC gear-motors. Top speed 0.4m/s
|
| Camera | - Microsoft LifeCam Cinema 720p camera
|
| Audio | - Noise cancelling microphone and mono high fidelity speaker
|
| Lights | - 2 x Cree XR-E high intensity LEDs: spotlight and reverse wide angle lights
|
| Camera Tilt | - Servo actuated 120 degree vertical (including mirror for reverse when docking)
|
| Frame | |
| Battery | - 3 cell Lithium Polymer 5000mAh, up to 10 hours run time
|
| Battery Charging | |
| Motor Controller | - Motors/Audio/Lights/Gyro Xaxxon MALG PCB, Arduino compatible microcontroller
|
| Charging Dock | - Automatic docking via 2D image processing
- International power compatible 120-240VAC > 15VDC wall wart
- Robot docks backwards, looking out when docked
|
| Sensors |
- Gyroscope: 3-Axis Digital Output, high accuracy rotational odometry
- Wheel encoder: single wheel quadrature hall-effects high resolution
- Temperature
- Battery current draw, system voltage and individual cell voltages
|
| System Hardware |
- Raspberry Pi 3B single board computer
- Micro SD card 8Gb
- Power Adapter: wide-input to 5V output buck regulator 2A
|
| Software |
- Remote control: standard web-browser client access, Android Air application mobile client
- Oculusprime Java Server (on-board high-level motor control, multi-user, Apache Tomcat web server, RED5 streaming media server, telnet API server)
- Telnet protocol interface, automated script control, Python API
- Linux Xubuntu 16.04 32-bit OS
- Wifi access point mode, multiple overlapping network auto-switching
- 3G/4G/LTE and NAT firewall operation capable via relay server
|
| Firmware | - Arduino-C/Wiring compatible motors/encoders/gyro microcontroller
|
| Dimensions | - 282mm length, 283mm width, 261mm height
- 3.5Kg weight. (Not including charging dock)
|
| Payload | |
| | |
↑ back to top
|