Xaxxon OpenLIDAR Sensor is a rotational laser scanner with open software and hardware,
intended for use with autonomous mobile robots and simultaneous-location-and-mapping (SLAM) applications.
It's ideal for obstacle avoidance, autonomous navigation, and mapping, even in sunlit environments.
It's fully compatible with all versions of ROS.
Xaxxon OpenLIDAR Sensor Assembled and tested, includes USB cable and mounting hardware
The sensor has a simple mechanical design, using the proven
Garmin LIDAR-Litev3
laser distance measurement sensor, wired through a rotational slip ring, with stepper motor drive,
two 3D printed frame parts,
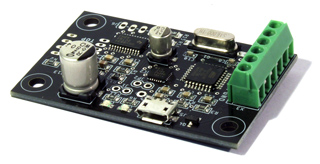
and an Arduino compatible PCB.
Power and communication are delivered via USB cable.
Python ROS drivers and firmware source code
are available on our Github.
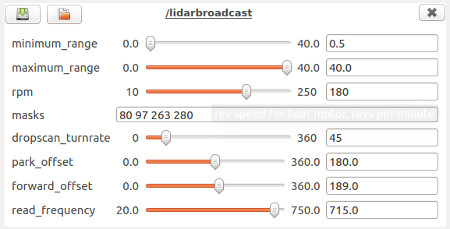
All configuration settings are dynamically tweakable using the
rqt_reconfigure GUI tool,
which comes standard with all versions of ROS.
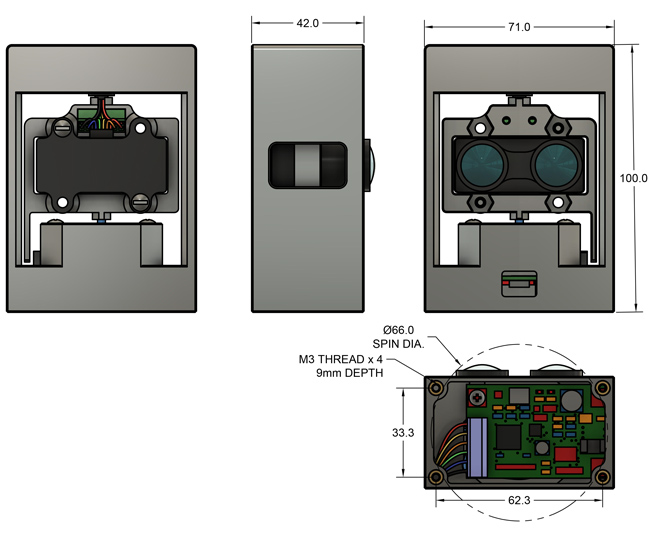
Dimensions: 100 x 71 x 42, 66mm spin diameter (see drawing)
Mounting holes: qty 4 of M3, centers on 62.3 x 33.3mm (see drawing)
Weight: 180g
Made in Canada
System Requirements
The sensor is compatible with Linux, Windows, and MacOS operating systems,
running on either x86 or ARM architectures. However, full drivers and support are currently
limited to systems running Linux OS with the Robot Operating System (ROS-Inigo/Kinetic/Melodic).
But, communication with host-systems other than Linux/ROS is straight forward using any
progrmaming language, thanks to the OpenLIDAR PCB's
simple serial
communication protocol.
Video: Real Time MAPPING of rooms with OpenLIDAR sensor and Oculus Prime robot Sample rate 715 Hz, 180 RPM, Gmapping algorithm, RViz visualization, 1m grid,
red points=raw lidar data
Manipulate settings in real-time with ROS rqt_reconfigure GUI tool
Open Hardware
The simple, open design of the Xaxxon OpenLIDAR makes it easy to modify and service, or design and build your own custom
sensor configuration